geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
UC Berkeley Open-source 3D-printed Berkeley Humanoid Lite Robot at $5,000
AI Summary
Humanoid robotics innovation has been hindered by expensive, closed-source commercial platforms, creating a barrier to entry for many researchers, educators, and hobbyists. The Berkeley Humanoid Lite project aims to break down these barriers by offering an open-source, affordable under $5,000, and customizable mid-scale humanoid robot that can be built using standard 3D printers and commonly available parts, thereby democratizing access to humanoid robotics research and development.
May 03 2025 09:33
In the rapidly evolving world of robotics, humanoid robots have captured our imagination with their potential to transform industries, assist humans, and advance artificial intelligence. However, there's been a persistent barrier to innovation in this field: accessibility. Most commercial humanoid robots come with hefty price tags and closed-source designs that limit experimentation and customization. This exclusivity has created a significant gap between those who can participate in humanoid robotics research and those who cannot.
Enter Berkeley Humanoid Lite – an open-source project that aims to democratize humanoid robotics by making it accessible, affordable, and customizable for researchers, educators, hobbyists, and innovators worldwide.
Breaking Down Barriers in Humanoid Robotics
For decades, the field of humanoid robotics has been dominated by high-cost commercial platforms that often exceed $100,000, placing them out of reach for most academic institutions, let alone individual researchers or hobbyists. Companies like Boston Dynamics, Agility Robotics, and Fourier Intelligence have produced impressive humanoid robots, but their closed-source designs and proprietary technologies create an exclusivity that hampers broader innovation.
The existing landscape can be categorized into three main groups:
Commercial proprietary systems: Robots like Agility's Digit, Fourier's GR1, and NAO H25 offer robust capabilities but at prohibitive costs. Even lower-priced options like Unitree's H1 and G1 remain closed-source, limiting customization.
Research lab designs: University labs develop sophisticated in-house platforms with high degrees of freedom and substantial torque capabilities, but these typically remain limited to select institutions due to their complexity and manufacturing requirements.
Open-source community projects: While more accessible, many still require specialized manufacturing techniques like CNC machining, or rely on servo motors that lack backdrivability and exhibit high reflected inertia, making them less suitable for scaling.
Introducing Berkeley Humanoid Lite
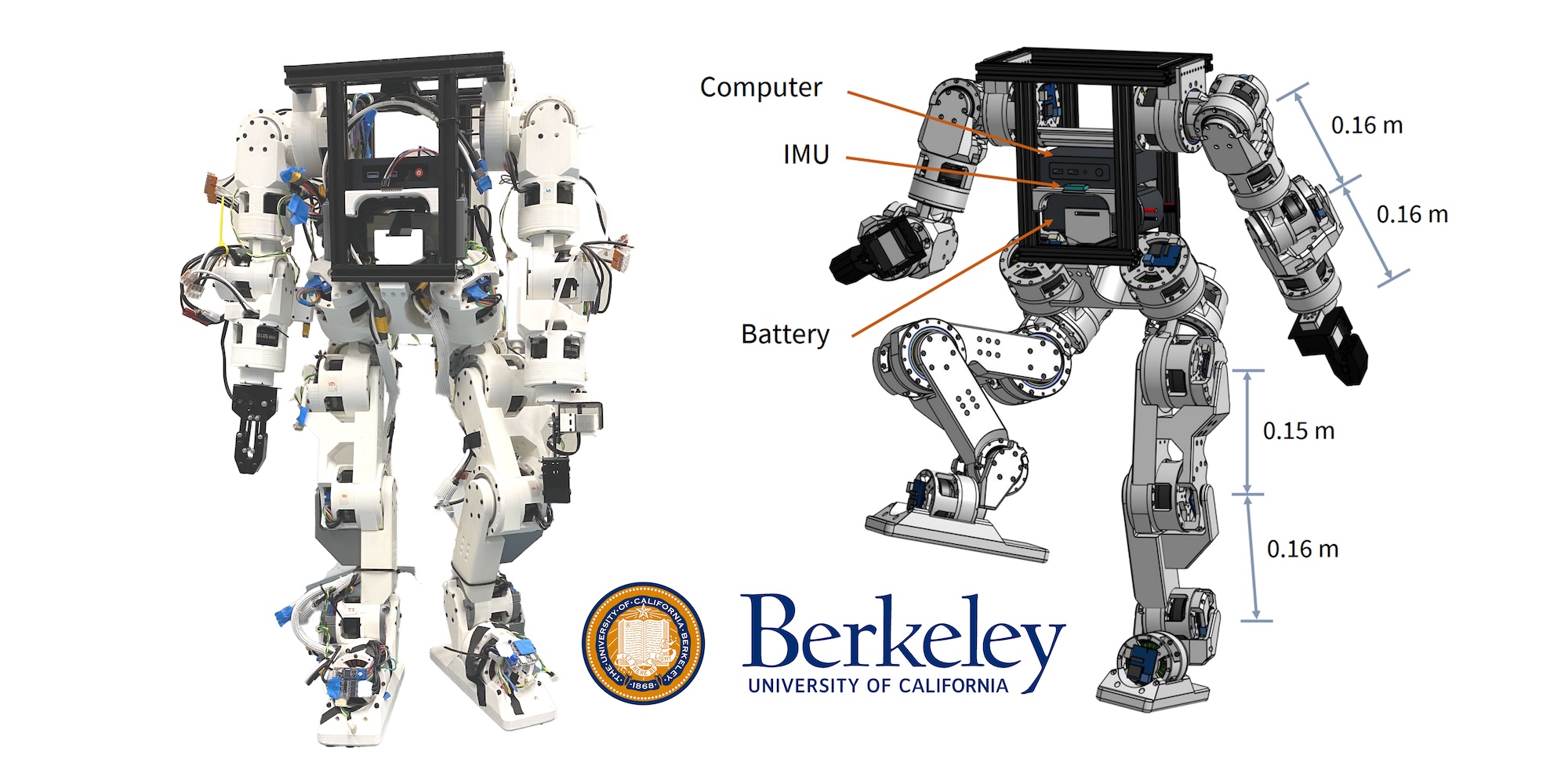
Berkeley Humanoid Lite represents a paradigm shift in this landscape. Developed by researchers at the University of California, Berkeley, this mid-scale humanoid robot stands 0.8 meters tall, weighs 16 kg, and costs under $5,000 to build - a fraction of what commercial options cost.
What makes this platform revolutionary isn't just its affordability but its thoughtful design philosophy centered around three core principles:
Accessibility: All structural components can be 3D-printed using standard desktop printers, and all electronic and mechanical parts can be sourced from common online vendors.
Affordability: The total hardware cost remains under $5,000 (based on U.S. market prices), making it viable for smaller labs, educational institutions, and even dedicated hobbyists.
Customizability: The fully open-source design allows users to modify and improve upon the platform to suit their specific research needs.
Innovative Design Solutions
The heart of Berkeley Humanoid Lite's innovative approach lies in its modular 3D-printed cycloidal gearbox actuators. This design choice addresses one of the most significant challenges in creating accessible humanoid robots: the actuators.
Traditional humanoid robots rely on expensive, proprietary actuators that can cost thousands of dollars each. The Berkeley team tackled this challenge by developing 3D-printed cycloidal gear actuators that balance cost-effectiveness with mechanical robustness.
While 3D-printed components typically raise concerns about durability and reliability, the team conducted extensive testing to validate their design. The cycloidal gear design provides an optimal form factor in this context, offering several advantages:
Higher torque capacity compared to other gear types of similar size
Improved shock resistance, essential for bipedal locomotion
Relatively simple manufacturing process using common FDM 3D printers
Modular design allowing for easy replacement of worn components
The robot features two sizes of these actuators driving the joints in both legs and arms, with the torso built using aluminum extrusions to support additional components. Communication between components occurs via a 1 Mbps CAN 2.0 bus, with an Intel N95 mini PC serving as the low-level control computer.
Real-World Capabilities
Despite its affordable construction, Berkeley Humanoid Lite doesn't compromise on functionality. The team has successfully implemented:
Reinforcement learning-based locomotion controllers with zero-shot policy transfer from simulation to hardware
Teleoperation systems enabling real-time manipulation tasks
Whole-body control functionality
Power comes from an onboard 6S 4000 mAh Lithium Polymer battery providing approximately 30 minutes of operation, with tethering options available for extended testing sessions.
The Impact on Robotics Research and Education
Berkeley Humanoid Lite represents more than just a cost-effective robot; it's a catalyst for democratizing an entire field of research. By lowering barriers to entry, this platform opens doors for:
Educational institutions seeking affordable platforms for teaching robotics, control theory, and artificial intelligence
Small research labs with limited budgets but innovative ideas
Independent researchers and hobbyists passionate about contributing to humanoid robotics
Global collaboration across institutions and borders, as the design can be replicated worldwide
This democratization is particularly important for advancing fields like reinforcement learning for bipedal locomotion, human-robot interaction, and robotic manipulation. These areas require physical platforms for testing and validation, which have traditionally been available only to well-funded research groups.
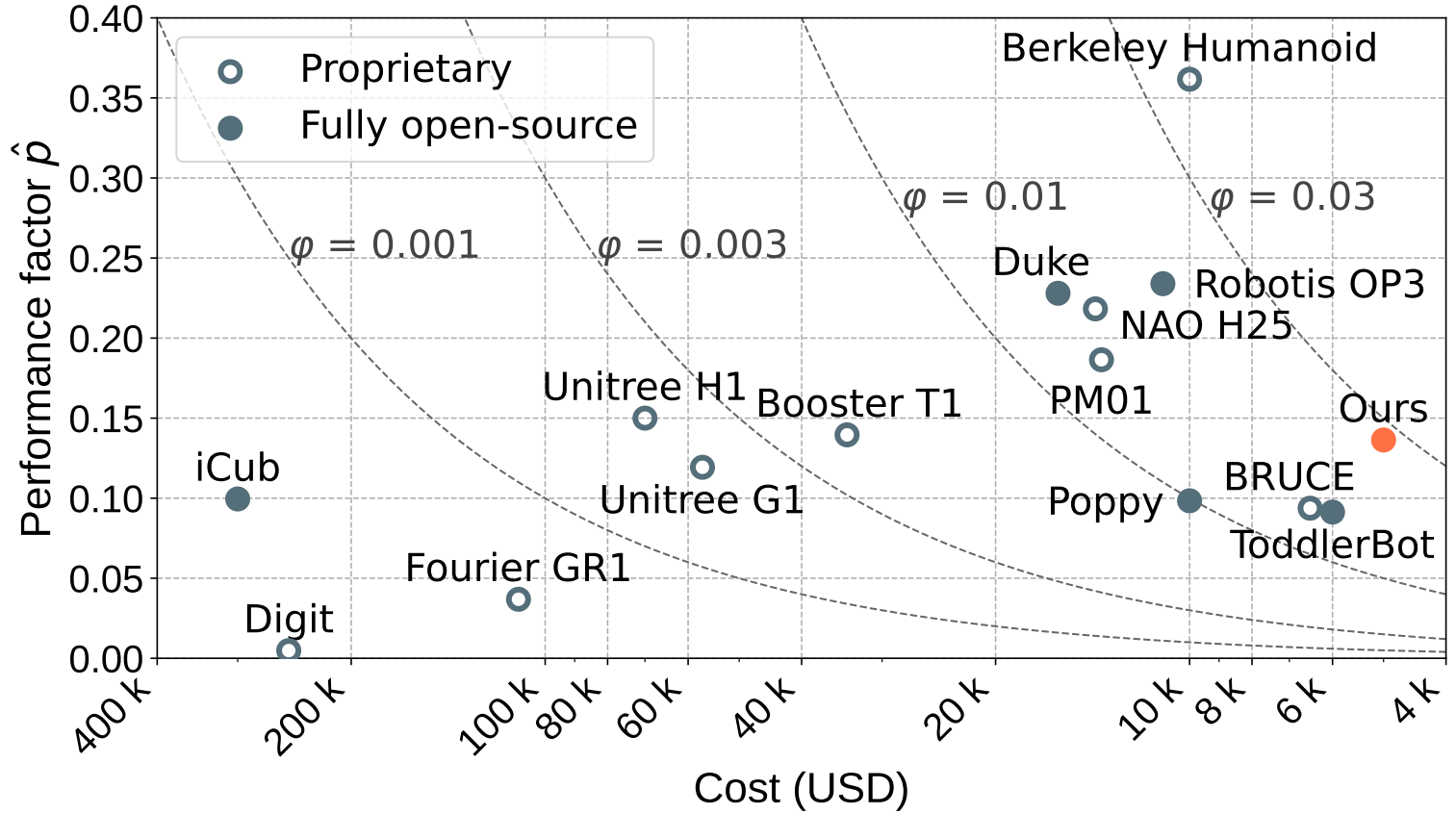
When evaluating robotics platforms, performance relative to cost provides a crucial metric. The Berkeley team introduced a "performance factor" that represents the average peak torque normalized by the robot's weight and height, along with a "performance-per-dollar" metric to assess cost-effectiveness.
In these comparisons, Berkeley Humanoid Lite stands out dramatically. While it doesn't match the raw performance of high-end commercial platforms costing 20-80 times more, its performance-per-dollar ratio is exceptional. This means researchers and educators can achieve meaningful results without prohibitive investments.
Building Your Own Berkeley Humanoid Lite
One of the most exciting aspects of this project is that anyone with access to a standard desktop 3D printer can build their own Berkeley Humanoid Lite. The team has made all resources available at https://berkeley-humanoid-lite.gitbook.io/docs, including:
Complete hardware design files
Embedded system code
Training and deployment frameworks
Detailed assembly instructions
Bill of materials with sourcing information
This comprehensive documentation ensures that users worldwide can replicate, customize, and improve upon the platform, fostering a community of innovation around humanoid robotics.
The Future of Democratized Robotics
Berkeley Humanoid Lite represents just the beginning of what could become a revolution in robotics accessibility. As the community grows around this platform, we can expect:
Community-driven improvements to the base design
Specialized variants optimized for specific research applications
Educational curricula built around the platform
More diverse participation in humanoid robotics research
Accelerated innovation through broader experimentation
The project exemplifies the power of open-source hardware in scientific fields, where access to physical platforms often determines who can contribute to advancing knowledge.
For researchers, educators, or hobbyists interested in building their own Berkeley Humanoid Lite, all resources are available at https://lite.berkeley-humanoid.org.